RP2040 BOOT version 2#
this series is some sorts of completion of RP2040 boot
This below is the sequence how RP2040 chip is actually boot, until we hit main function. The Bootrom size is limited to 16kB. It contains
Processor core 0 initial boot sequence
Processor core 1 low power wait and launch protocol
USB MSC class-compliant bootloader with UF2 support for downloading code/data to FLASH or RAM
USB PICOBOOT bootloader interface for advanced management
nvm, let’s take how rp2040 is boot.
lab setup#
let’s download the bootrom binary code first
wget https://github.com/raspberrypi/pico-bootrom-rp2040/releases/download/b2/b2.elf
why I should download the b2.elf first? because the bootrom code iself is “baked” into silicon metal, and unlike
the normal program that we can flash custom code, the bootrom is fixed. this is the reason
why we need a .elf, because we want do something with binary in the chip, and the elf itself is
just a “map” for us.
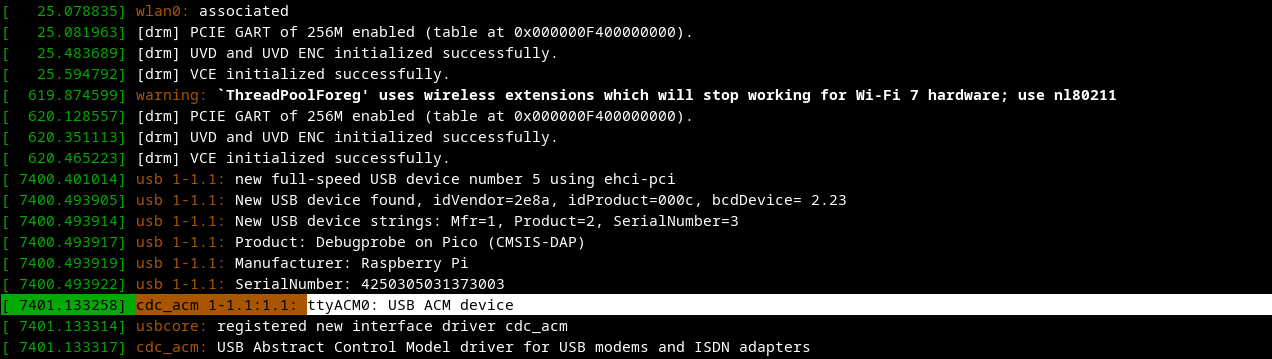
before all happens, let’s find your RP2040 SWD to USB device driver, im on /dev/ttyACM0
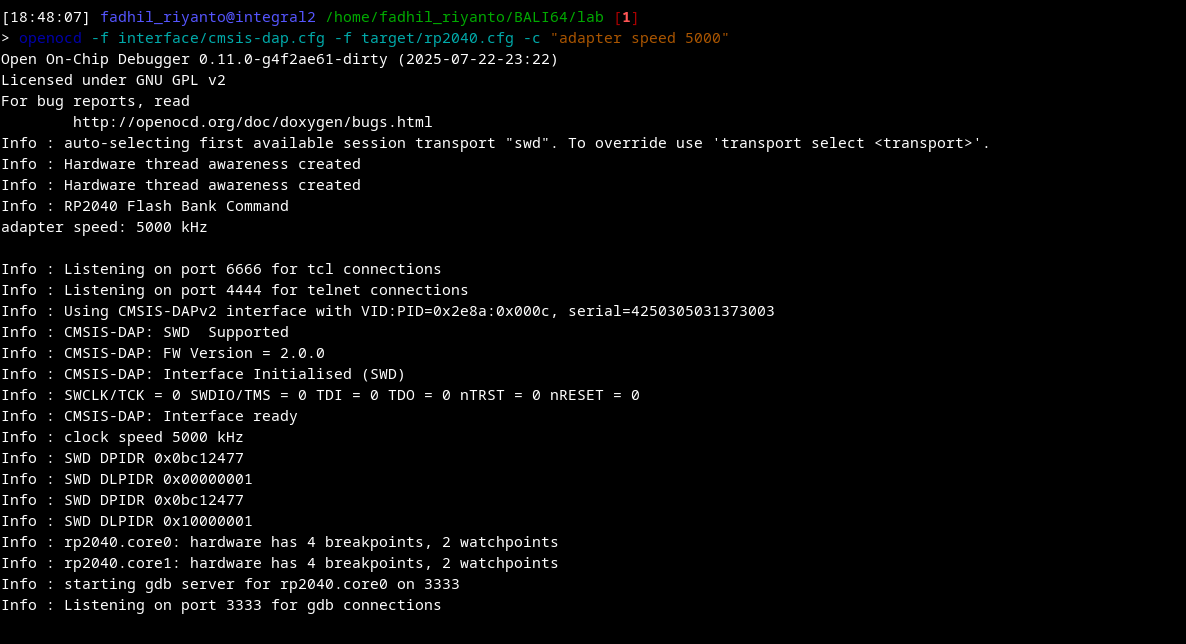
firing our openocd (the debugger)
step 1#
load your b2.elf into gdb
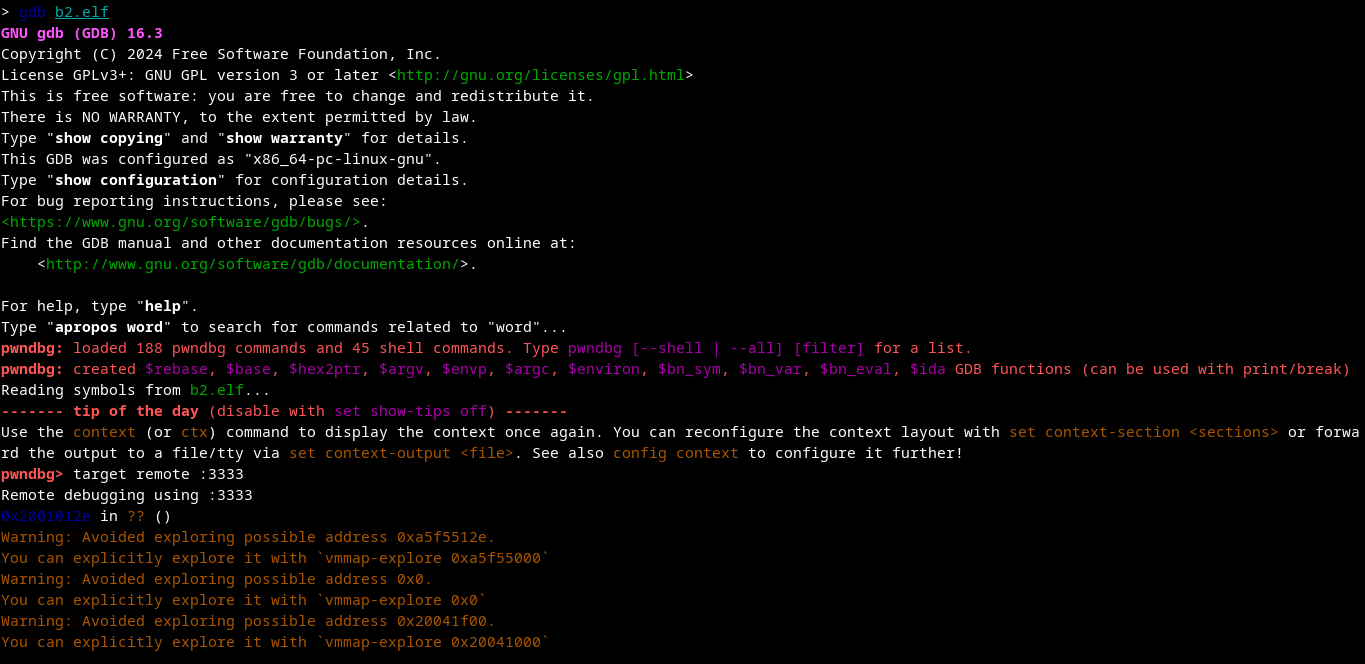
after it, let’s analyze the source code
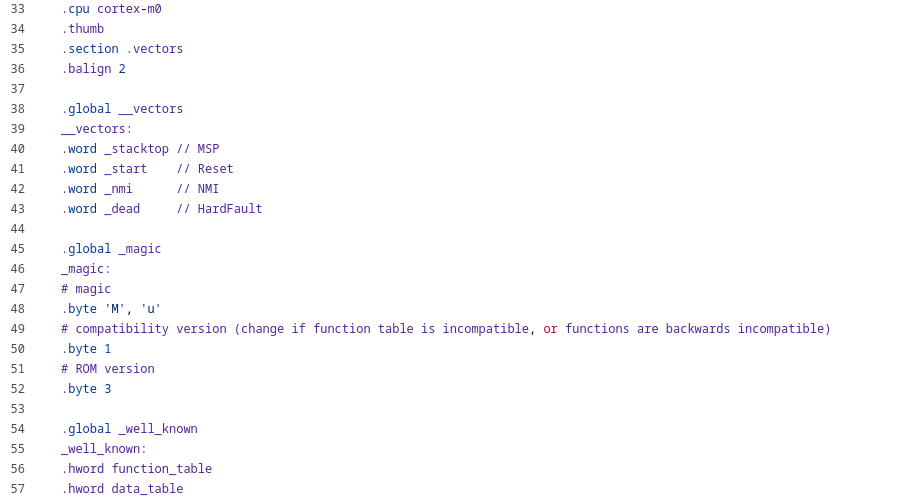
raspberrypi/pico-bootrom-rp2040, this confirm us that
bootrom/bootrom_rt0.Sis used. let’s check it
step 2#
verifying if “that is actually” the bootloader, by dumping its assembly and compare it with real source code
here real source code
step 3#
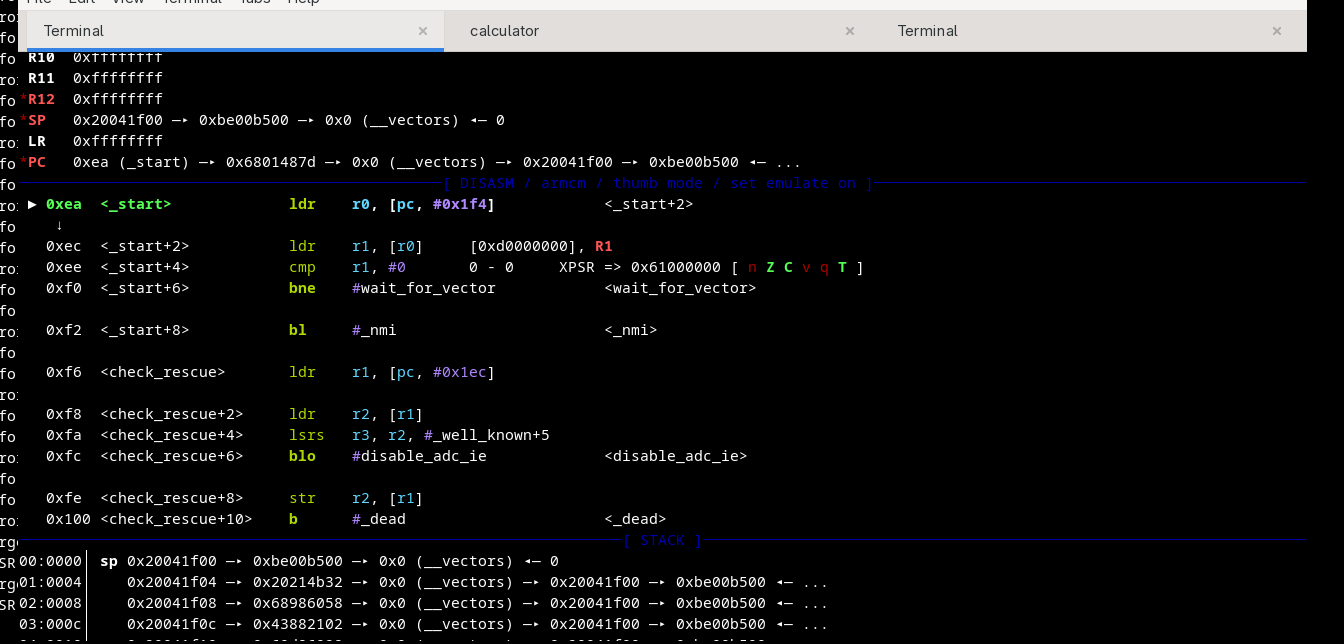
walk through bootloader
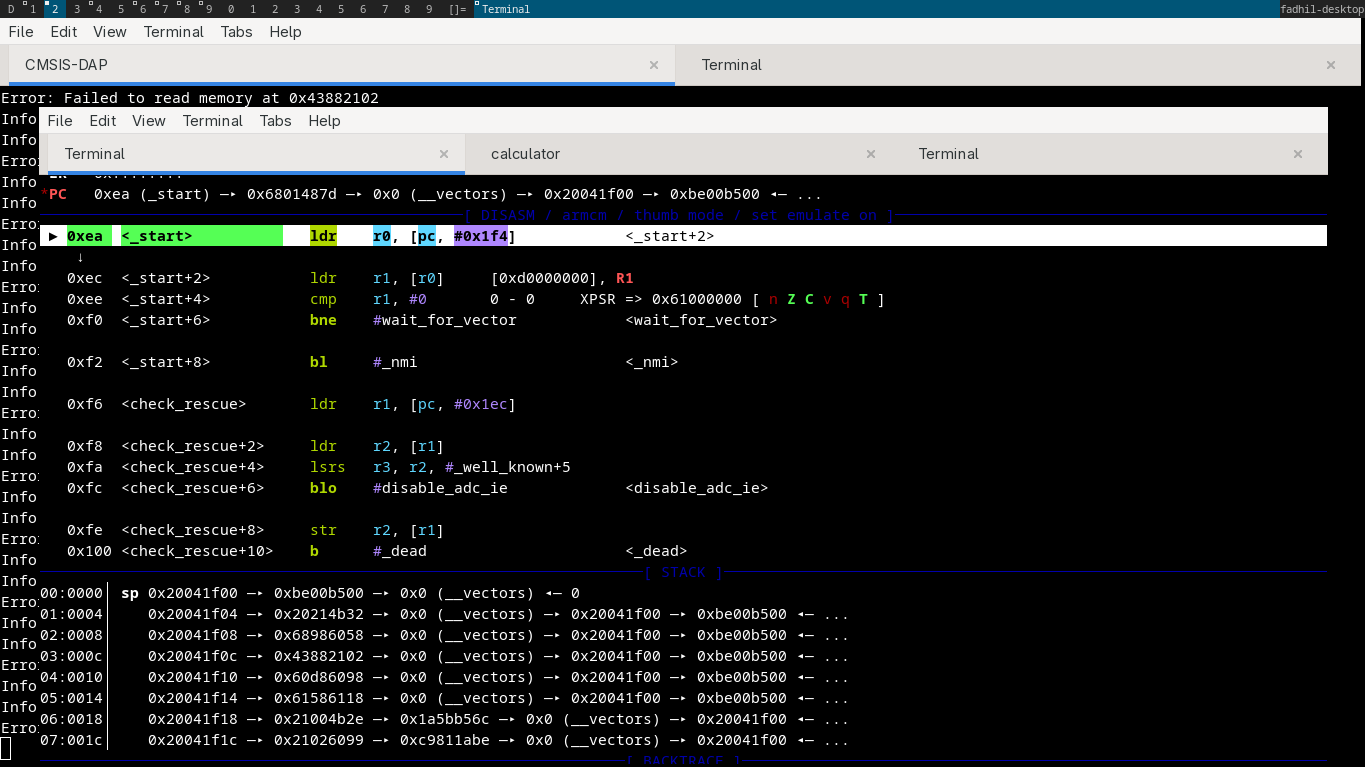
how I can find 0xea offsets? this is very simple.
pwndbg> monitor reset init
target halted due to debug-request, current mode: Thread
xPSR: 0xf1000000 pc: 0x000000ea msp: 0x20041f00
target halted due to debug-request, current mode: Thread
xPSR: 0xf1000000 pc: 0x000000ea msp: 0x20041f00
note:
- xPSR is a x program status register, contains
Application Program Status Register
Interrupt Program Status Register
Execution Program Status Register
I will cover this later, but let’s see the pc, it show us that 0xea is next instruction, let’s add
hardware breakpoint here.
step 4#
processor controlled boot sequence, here how rp2040 is boot
walk 0#
Reset to both processors released: both enter ROM at same location
walk 1#
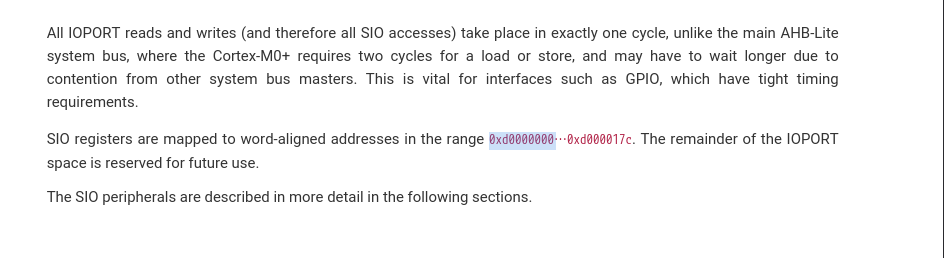
Processors check SIO.CPUID here the link: raspberrypi/pico-bootrom-rp2040
because the SIO register is word-aligned and started from address 0xd0000000, so let’s deep dive in this
after it, this asm code is launched by both processor, TL;DR. if core0, go ahead, if core1 go to sleep.
check_core:
// NOTE: We DO NOT use any stack prior to possible watchdog entry (this includes NMI vector handler)
ldr r0, =SIO_BASE
ldr r1, [r0, #SIO_CPUID_OFFSET]
cmp r1, #0
this code show us that - load 0xd0000000 into r0 - then, compute r0 + CPUDID_OFFSET, which
then, store the result into r1
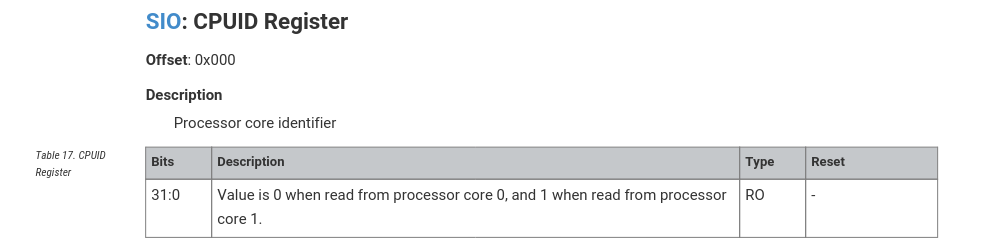
Note
because the docs itself say “Value is 0 when read from processor core 0, and 1 when read from processor core 1.”, so we need to check if r1 is equal with 0. we do this with cmp r1, #0
other cond, when its not a core0, jump to here
walk 2#
If power up event was from Rescue DP, clear this flag and halt immediately
I think this code do best job: raspberrypi/pico-bootrom-rp2040